





Исследователи из университета ИТМО предложили новый подход к созданию роботов, которые способны работать в сложных условиях с сильными нагрузками и в непредсказуемой среде. Одной из ключевых особенностей нового метода является использование гибких соединений вместо обычных движущихся частей с подшипниками. Такая конструкция делает роботов более устойчивыми к ударам и столкновениям, а также повышает их энергоэффективность.
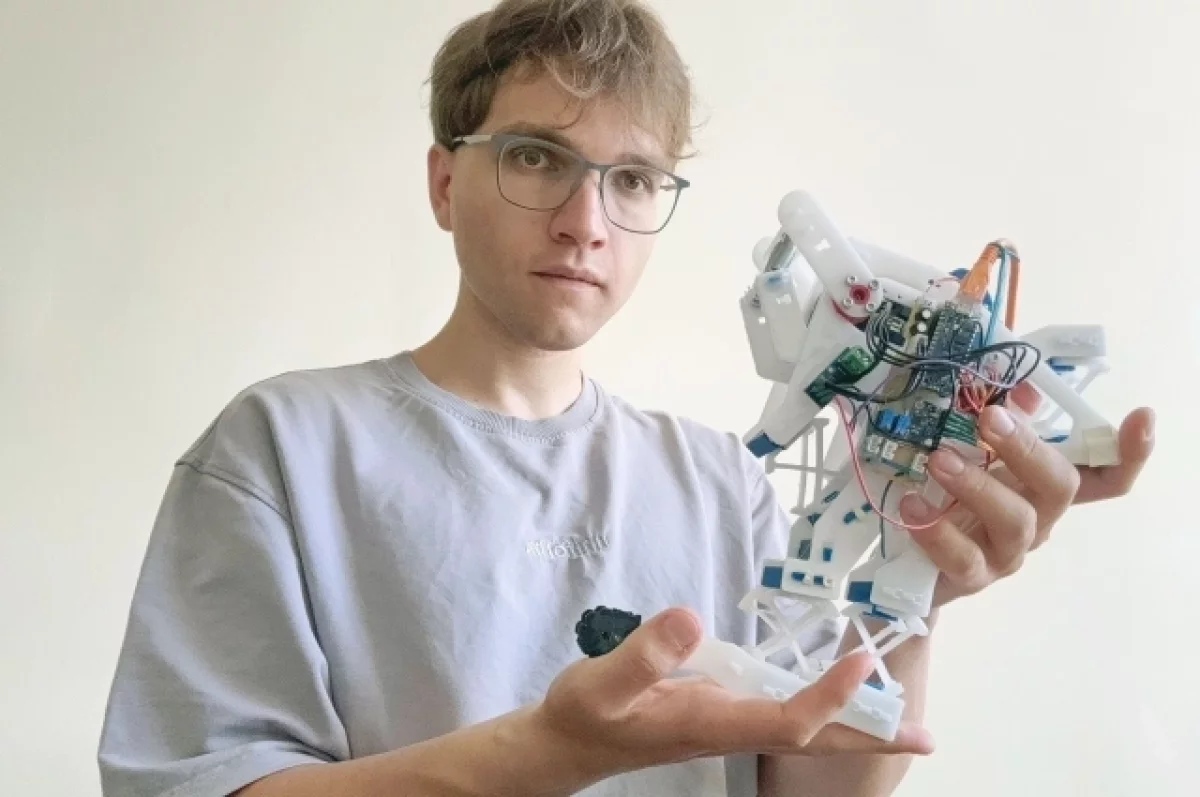
Автором метода стал аспирант Егор Ракшин, который разработал уникальный прототип робота с гибкими сочленениями.
Новый взгляд
Главная проблема, которую надо решить современным конструкторам роботов, – добиться того, чтобы их изделие могло функционировать автономно и при этом адекватно реагировало на любые неожиданные изменения окружающей среды. Необходимо, чтобы робот не только эффективно передвигался, но и мог противостоять, например, внезапным ударам и столкновениям. Как человек, который, споткнувшись о неожиданное препятствие, всё-таки сможет удержаться на ногах.
Решение проблемы, предложенное в ИТМО, основано на идее использования гибких сочленений в конструкции робота. Эти сочленения выполняют функцию своеобразной «подвески», которая способна поглощать энергию удара и возвращать её обратно в механизм.
Как рассказал автор метода, инженер лаборатории «Биомехатроники и энергоэффективной робототехники» Егор Ракшин, идея создания роботов, способных адаптироваться к условиям, где невозможно предсказать ситуацию, возникла давно.
«Интеграция гибких сочленений – это один из путей повышения адаптации мобильных роботов к сложным условиям. Мы хотели создать робота, который мог бы не только выдерживать удары, но и адаптироваться к различным типам поверхностей», – говорит Ракшин.
Одной из главных особенностей разработанного метода является использование гибких сочленений вместо традиционных подшипников. Подшипниковые узлы, которые широко используются в машиностроении, имеют ряд ограничений. У них есть преимущества в виде высокой жёсткости и точности, но не всегда эти качества необходимы. Подшипники увеличивают вес, стоимость, сложность конструкции, требуют регулярного смазывания и герметизации, чтобы защитить уязвимый узел от пыли и влаги. Всё это повышает стоимость робота и ограничивает возможности его использования.
Гибкие сочленения, напротив, не требуют смазки и не нуждаются в защите от внешних воздействий. Благодаря этому роботы, созданные на их основе, меньше весят, более просты в ремонте и обслуживании. Это снижает требования к точности изготовления деталей, что упрощает производство роботов и удешевляет их эксплуатацию.
«Такие сочленения работают как единое целое, что снижает энергетические потери на трение и повышает скорость производства», – поясняет Егор.

Робот-гепард
Ещё одним важным преимуществом гибких сочленений является их способность использовать энергию удара для восстановления. Это значит, что при падении или столкновении часть энергии возвращается обратно, помогая роботу продолжать движение. По сути, примерно по тому же принципу функционируют суставы у человека и животных.
Для проверки эффективности нового метода был создан прототип робота с гибкими сочленениями. В отличие от большинства аналогичных решений, в конструкции робота полностью отсутствуют подшипники, что значительно упрощает и ускоряет процесс прототипирования. Благодаря использованию 3D-печати вся нога робота может быть напечатана целиком, без необходимости сборки отдельных элементов. Это снижает затраты на производство.
«Наш прототип ноги – это только начало. В перспективе можно создать четырёхногого робота, например, робота-гепарда, который будет способен перемещаться на большие расстояния», – отмечает Ракшин.

Краш-тест пройден
Как объяснил Егор, в последнее время проектирование формы и структуры робота стало важной частью разработок.
«Необходимо не только разрабатывать адаптивные системы управления, но и параллельно работать над «умной» механикой. Это важный аспект, который критически влияет на автономность роботов», – говорит он.
Для того чтобы убедиться в работоспособности новой конструкции, учёные провели серию испытаний с прототипом робота. Были протестированы различные сценарии, включая прыжки на месте, галоп вдоль плоскости и наклонной поверхности, а также падение с высоты. Один из тестов включал внезапные динамические воздействия – сброс с метровой высоты, пинки, толчки, опрокидывания. Несмотря на такие нагрузки, робот успешно продолжал движение и не получил повреждений.
«Мы проверяли, насколько робот способен «отпружинивать» при ударах, и тесты показали, что конструкция работает эффективно. Гибкие сочленения позволили снизить нагрузки на двигатели и сохранить их в рабочем состоянии даже после сильных ударов», – рассказывает Ракшин.
Важно отметить, что во время тестов робот действовал «вслепую», без обратной связи с датчиками. Это ещё раз доказало эффективность гибких сочленений, которые физически реагируют на внешние воздействия мгновенно, не требуя сложных систем управления или дополнительного энергопотребления.

Универсальный солдат
Одним из ключевых преимуществ робота с гибкими сочленениями является его способность работать в условиях, где точная информация об окружении недоступна. В реальных сценариях это может быть чрезвычайно полезно, например, при выполнении задач в условиях экстремального климата, на пересечённой местности или во время спасательных операций.
«Работа в неструктурированной среде требует от роботов способности моментально адаптироваться к изменениям. Если робот оснащён мощными приводами, он может представлять опасность для окружающих объектов. Гибкие сочленения позволяют обеспечить безопасность, ведь робот физически адаптируется к воздействию, не требуя для этого сложных вычислений или датчиков», – поясняет Егор.
В перспективе такие роботы могут использоваться для решения широкого спектра задач в экономике или логистике. Например, в условиях Арктики они смогут мониторить состояние удалённых объектов, таких как газонефтепроводы или метеостанции. Роботы с гибкими сочленениями также будут полезны в логистических операциях, где требуются высокая автономность и способность преодолевать большие расстояния.
Исследователи планируют продолжать развивать эту технологию и использовать её в более сложных проектах.
«Наш метод подходит не только для создания роботов, которые могут двигаться, но и для других машин с движущимися частями, например, для устройств, которые что-то захватывают. Гибкие соединения уже давно используются для того, чтобы точно управлять движениями и ощущать силу. Теперь появилась возможность использовать энергию ударов, чтобы восстанавливать работу этих устройств при сильных нагрузках в больших масштабах», – говорит Егор.
В будущем это может привести к созданию массово производимых роботов, которые будут более дёшевы в изготовлении и обслуживании благодаря использованию технологий быстрого прототипирования и гибких сочленений.
Результаты исследования представят на одной из крупнейших международных конференций по робототехнике, которая пройдёт в октябре в Абу-Даби. Она считается одной из самых значимых конференций для исследователей в области робототехники. Участие в её работе позволит популяризировать российские достижения в области робототехники на мировом уровне.
Проект реализован на средства гранта Санкт-Петербурга.

Подписывайтесь на АиФ в  MAX MAX
|

 В СПбГАСУ после модернизации открылась лаборатория механических испытаний
В СПбГАСУ после модернизации открылась лаборатория механических испытаний  Нейросеть для поиска сотрудников по соцсетям создали в Петербурге
Нейросеть для поиска сотрудников по соцсетям создали в Петербурге  Добытый в Антарктиде лёд, которому более миллиона лет, привезли в Петербург
Добытый в Антарктиде лёд, которому более миллиона лет, привезли в Петербург  Чем опасна беспроводная зарядка?
Чем опасна беспроводная зарядка?